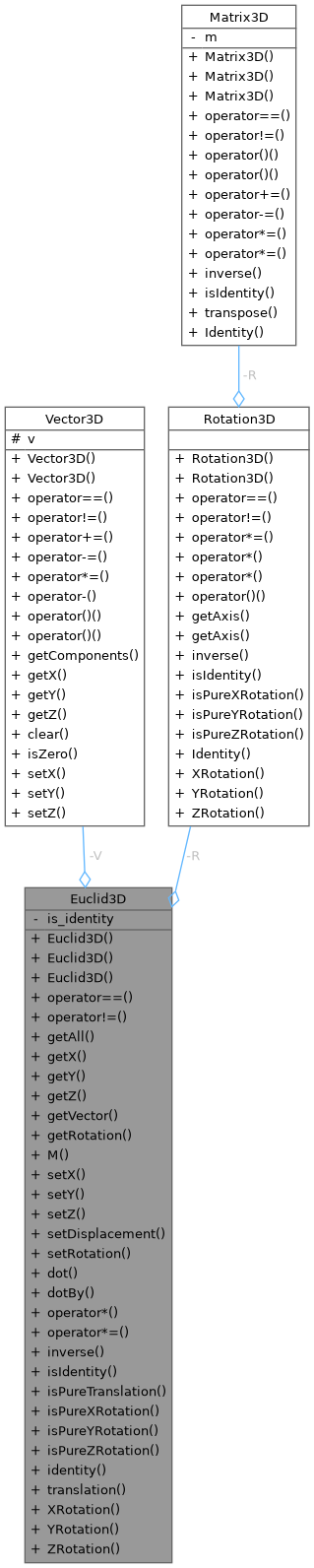
Displacement and rotation in space. More...
#include <Euclid3D.h>
Public Member Functions | |
| Euclid3D () | |
| Default constructor. | |
| Euclid3D (const Vector3D &V, const Rotation3D &R) | |
| Constructor/. | |
| Euclid3D (double x, double y, double z, double vx, double vy, double vz) | |
| Constructor. | |
| bool | operator== (const Euclid3D &) const |
| bool | operator!= (const Euclid3D &) const |
| void | getAll (double &x, double &y, double &z, double &vx, double &vy, double &vz) const |
| Unpack. | |
| double | getX () const |
| Get displacement. | |
| double | getY () const |
| Get displacement. | |
| double | getZ () const |
| Get displacement. | |
| const Vector3D & | getVector () const |
| Get displacement. | |
| const Rotation3D & | getRotation () const |
| Get rotation. | |
| double | M (int row, int col) const |
| Get component. | |
| void | setX (double x) |
| Set displacement. | |
| void | setY (double y) |
| Set displacement. | |
| void | setZ (double z) |
| Set displacement. | |
| void | setDisplacement (const Vector3D &V) |
| Set displacement. | |
| void | setRotation (const Rotation3D &R) |
| Set rotation. | |
| Euclid3D | dot (const Euclid3D &rhs) const |
| Dot product. | |
| const Euclid3D & | dotBy (const Euclid3D &rhs) |
| Dot product with assign. | |
| Euclid3D | operator* (const Euclid3D &rhs) const |
| Dot product. | |
| const Euclid3D & | operator*= (const Euclid3D &rhs) |
| Dot product with assign. | |
| Euclid3D | inverse () const |
| Inverse. | |
| bool | isIdentity () const |
| Test for identity. | |
| bool | isPureTranslation () const |
| Test for translation. | |
| bool | isPureXRotation () const |
| Test for rotation. | |
| bool | isPureYRotation () const |
| Test for rotation. | |
| bool | isPureZRotation () const |
| Test for rotation. | |
Static Public Member Functions | |
| static Euclid3D | identity () |
| Make identity. | |
| static Euclid3D | translation (double x, double y, double z) |
| Make translation. | |
| static Euclid3D | XRotation (double angle) |
| Make rotation. | |
| static Euclid3D | YRotation (double angle) |
| Make rotation. | |
| static Euclid3D | ZRotation (double angle) |
| Make rotation. | |
Private Attributes | |
| Vector3D | V |
| Rotation3D | R |
| bool | is_identity |
Detailed Description
Displacement and rotation in space.
Definition at line 67 of file Euclid3D.h.
Constructor & Destructor Documentation
◆ Euclid3D() [1/3]
|
inline |
Default constructor.
Definition at line 204 of file Euclid3D.h.
Referenced by identity(), inverse(), translation(), XRotation(), YRotation(), and ZRotation().
◆ Euclid3D() [2/3]
| Euclid3D::Euclid3D | ( | const Vector3D & | V, |
| const Rotation3D & | R | ||
| ) |
Constructor/.
Definition at line 33 of file Euclid3D.cpp.
◆ Euclid3D() [3/3]
| Euclid3D::Euclid3D | ( | double | x, |
| double | y, | ||
| double | z, | ||
| double | vx, | ||
| double | vy, | ||
| double | vz | ||
| ) |
Constructor.
Definition at line 30 of file Euclid3D.cpp.
Member Function Documentation
◆ dot()
Dot product.
Definition at line 65 of file Euclid3D.cpp.
References dotBy().

◆ dotBy()
Dot product with assign.
Definition at line 70 of file Euclid3D.cpp.
References is_identity, R, and V.
Referenced by dot(), TBeamline< T >::getTotalTransform(), operator*(), and operator*=().
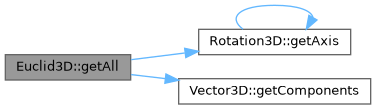
◆ getAll()
| void Euclid3D::getAll | ( | double & | x, |
| double & | y, | ||
| double & | z, | ||
| double & | vx, | ||
| double & | vy, | ||
| double & | vz | ||
| ) | const |
Unpack.
Definition at line 40 of file Euclid3D.cpp.
References Rotation3D::getAxis(), Vector3D::getComponents(), R, and V.
◆ getRotation()
| const Rotation3D & Euclid3D::getRotation | ( | ) | const |
Get rotation.
Definition at line 47 of file Euclid3D.cpp.
References R.
Referenced by Ring::appendElement(), Ring::checkMidplane(), Ring::getRotationStartToEnd(), and Ring::rotateToCyclCoordinates().
◆ getVector()
| const Vector3D & Euclid3D::getVector | ( | ) | const |
Get displacement.
Definition at line 45 of file Euclid3D.cpp.
References V.
Referenced by Ring::appendElement(), Ring::checkMidplane(), Euclid3DGeometry::getArcLength(), BendBase::getChordLength(), Ring::rotateToCyclCoordinates(), and Euclid3DGeometry::setElementLength().
◆ getX()
|
inline |
Get displacement.
Definition at line 206 of file Euclid3D.h.
References Vector3D::getX(), and V.

◆ getY()
|
inline |
Get displacement.
Definition at line 208 of file Euclid3D.h.
References Vector3D::getY(), and V.

◆ getZ()
|
inline |
Get displacement.
Definition at line 210 of file Euclid3D.h.
References Vector3D::getZ(), and V.

◆ identity()
|
static |
Make identity.
Definition at line 97 of file Euclid3D.cpp.
References Euclid3D().
Referenced by BGeometryBase::getEntrancePatch(), BGeometryBase::getExitPatch(), NullGeometry::getTransform(), and NullGeometry::getTransform().

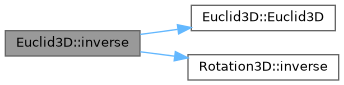
◆ inverse()
| Euclid3D Euclid3D::inverse | ( | ) | const |
Inverse.
Definition at line 84 of file Euclid3D.cpp.
References Euclid3D(), Rotation3D::inverse(), R, and V.
Referenced by Inverse().
◆ isIdentity()
|
inline |
◆ isPureTranslation()
| bool Euclid3D::isPureTranslation | ( | ) | const |
Test for translation.
Definition at line 89 of file Euclid3D.cpp.
References Rotation3D::isIdentity(), and R.

◆ isPureXRotation()
| bool Euclid3D::isPureXRotation | ( | ) | const |
Test for rotation.
Definition at line 91 of file Euclid3D.cpp.
References Rotation3D::isPureXRotation(), Vector3D::isZero(), R, and V.

◆ isPureYRotation()
| bool Euclid3D::isPureYRotation | ( | ) | const |
Test for rotation.
Definition at line 93 of file Euclid3D.cpp.
References Rotation3D::isPureYRotation(), Vector3D::isZero(), R, and V.

◆ isPureZRotation()
| bool Euclid3D::isPureZRotation | ( | ) | const |
Test for rotation.
Definition at line 95 of file Euclid3D.cpp.
References Rotation3D::isPureZRotation(), Vector3D::isZero(), R, and V.

◆ M()
|
inline |
◆ operator!=()
| bool Euclid3D::operator!= | ( | const Euclid3D & | rhs | ) | const |
Definition at line 38 of file Euclid3D.cpp.
◆ operator*()
Dot product.
Definition at line 77 of file Euclid3D.cpp.
References dotBy().

◆ operator*=()
Dot product with assign.
Definition at line 82 of file Euclid3D.cpp.
References dotBy().

◆ operator==()
| bool Euclid3D::operator== | ( | const Euclid3D & | rhs | ) | const |
Definition at line 36 of file Euclid3D.cpp.
◆ setDisplacement()
| void Euclid3D::setDisplacement | ( | const Vector3D & | V | ) |
Set displacement.
Definition at line 55 of file Euclid3D.cpp.
References is_identity, Vector3D::isZero(), and V.
Referenced by Euclid3DGeometry::setElementLength().

◆ setRotation()
| void Euclid3D::setRotation | ( | const Rotation3D & | R | ) |
Set rotation.
Definition at line 60 of file Euclid3D.cpp.
References is_identity, Rotation3D::isIdentity(), and R.

◆ setX()
| void Euclid3D::setX | ( | double | x | ) |
Set displacement.
Definition at line 49 of file Euclid3D.cpp.
References Vector3D::setX(), and V.

◆ setY()
| void Euclid3D::setY | ( | double | y | ) |
Set displacement.
Definition at line 51 of file Euclid3D.cpp.
References Vector3D::setY(), and V.

◆ setZ()
| void Euclid3D::setZ | ( | double | z | ) |
Set displacement.
Definition at line 53 of file Euclid3D.cpp.
References Vector3D::setZ(), and V.

◆ translation()
|
static |
Make translation.
Definition at line 99 of file Euclid3D.cpp.
References Euclid3D(), and Rotation3D::Identity().
Referenced by StraightGeometry::getEntranceFrame(), RBendGeometry::getEntrancePatch(), StraightGeometry::getExitFrame(), RBendGeometry::getExitPatch(), StraightGeometry::getTotalTransform(), StraightGeometry::getTransform(), and StraightGeometry::getTransform().

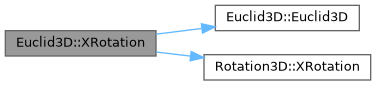
◆ XRotation()
|
static |
Make rotation.
Definition at line 103 of file Euclid3D.cpp.
References Euclid3D(), is_identity, and Rotation3D::XRotation().
◆ YRotation()
|
static |
Make rotation.
Definition at line 109 of file Euclid3D.cpp.
References Euclid3D(), is_identity, and Rotation3D::YRotation().
Referenced by RBendGeometry::getEntranceFrame(), RBendGeometry::getEntrancePatch(), RBendGeometry::getExitFrame(), RBendGeometry::getExitPatch(), and RBendGeometry::getTotalTransform().
◆ ZRotation()
|
static |
Make rotation.
Definition at line 115 of file Euclid3D.cpp.
References Euclid3D(), is_identity, and Rotation3D::ZRotation().
Member Data Documentation
◆ is_identity
|
mutableprivate |
Definition at line 192 of file Euclid3D.h.
Referenced by dotBy(), isIdentity(), setDisplacement(), setRotation(), XRotation(), YRotation(), and ZRotation().
◆ R
|
private |
Definition at line 191 of file Euclid3D.h.
Referenced by dotBy(), getAll(), getRotation(), inverse(), isPureTranslation(), isPureXRotation(), isPureYRotation(), isPureZRotation(), M(), operator!=(), operator==(), and setRotation().
◆ V
|
private |
Definition at line 190 of file Euclid3D.h.
Referenced by dotBy(), getAll(), getVector(), getX(), getY(), getZ(), inverse(), isPureXRotation(), isPureYRotation(), isPureZRotation(), operator!=(), operator==(), setDisplacement(), setX(), setY(), and setZ().
The documentation for this class was generated from the following files: