#include "Algorithms/Quaternion.hpp"#include <cmath>#include <iostream>#include "Algorithms/Matrix.h"#include "OPALTypes.h"#include "Physics/Physics.h"#include "Utilities/GeneralOpalException.h"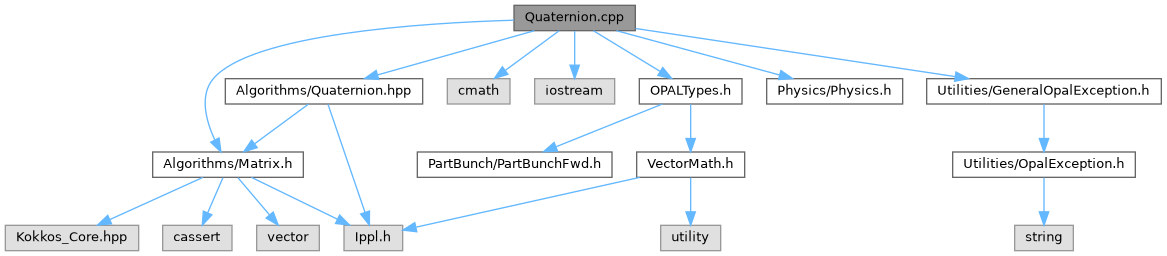
Go to the source code of this file.
Functions | |
| Quaternion | getQuaternion (ippl::Vector< double, 3 > u, ippl::Vector< double, 3 > ref) |
Return a unit quaternion that rotates vec onto reference. | |
Function Documentation
◆ getQuaternion()
| Quaternion getQuaternion | ( | ippl::Vector< double, 3 > | vec, |
| ippl::Vector< double, 3 > | reference | ||
| ) |
Return a unit quaternion that rotates vec onto reference.
Both input vectors are normalized internally. For the generic case, the quaternion is built from the rotation axis \(\mathbf{a} \propto \mathbf{vec} \times \mathbf{reference}\) and the half-angle formula. For antiparallel vectors the current implementation chooses an arbitrary orthogonal axis, so the 180-degree rotation is valid but not deterministic.
Definition at line 35 of file Quaternion.cpp.
References cross(), dot(), and Physics::pi.
Referenced by ParticleContainer< T, Dim >::applyFractionalStep(), ParallelTracker::computeSpaceChargeFields(), Monitor::driftToCorrectPositionAndSave(), TEST_F(), TEST_F(), TEST_F(), TEST_F(), and ParticleContainer< T, Dim >::updateRefToLabCSTrafo().